Swerve Drivetrain
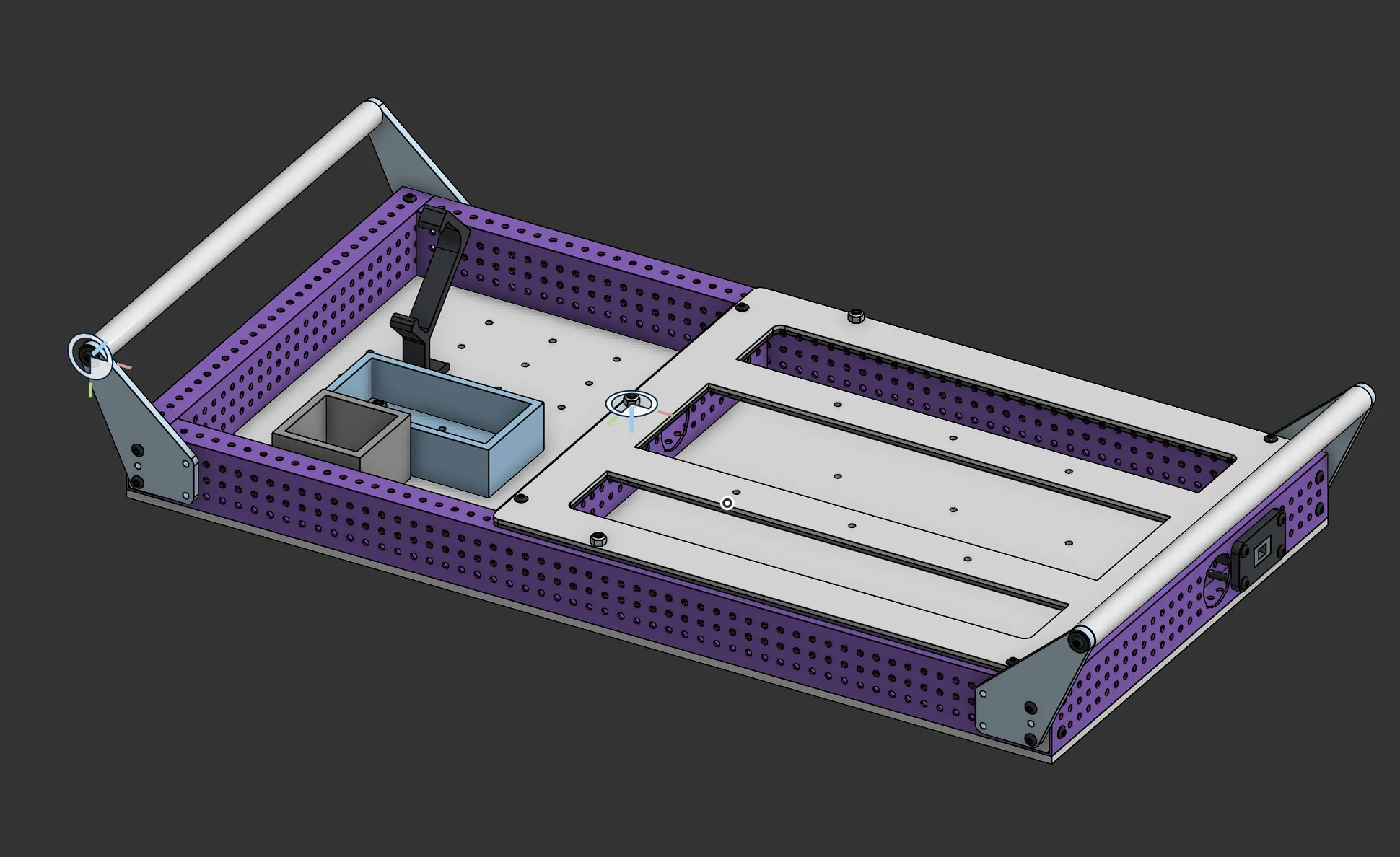
FlagshipA 12×12 in. custom swerve drive built around a purpose-designed PCB carrier board and field-oriented motor control. Compact, but it proves the point. We can pull mechanical, electrical, and firmware into one working stack.
Read the writeup
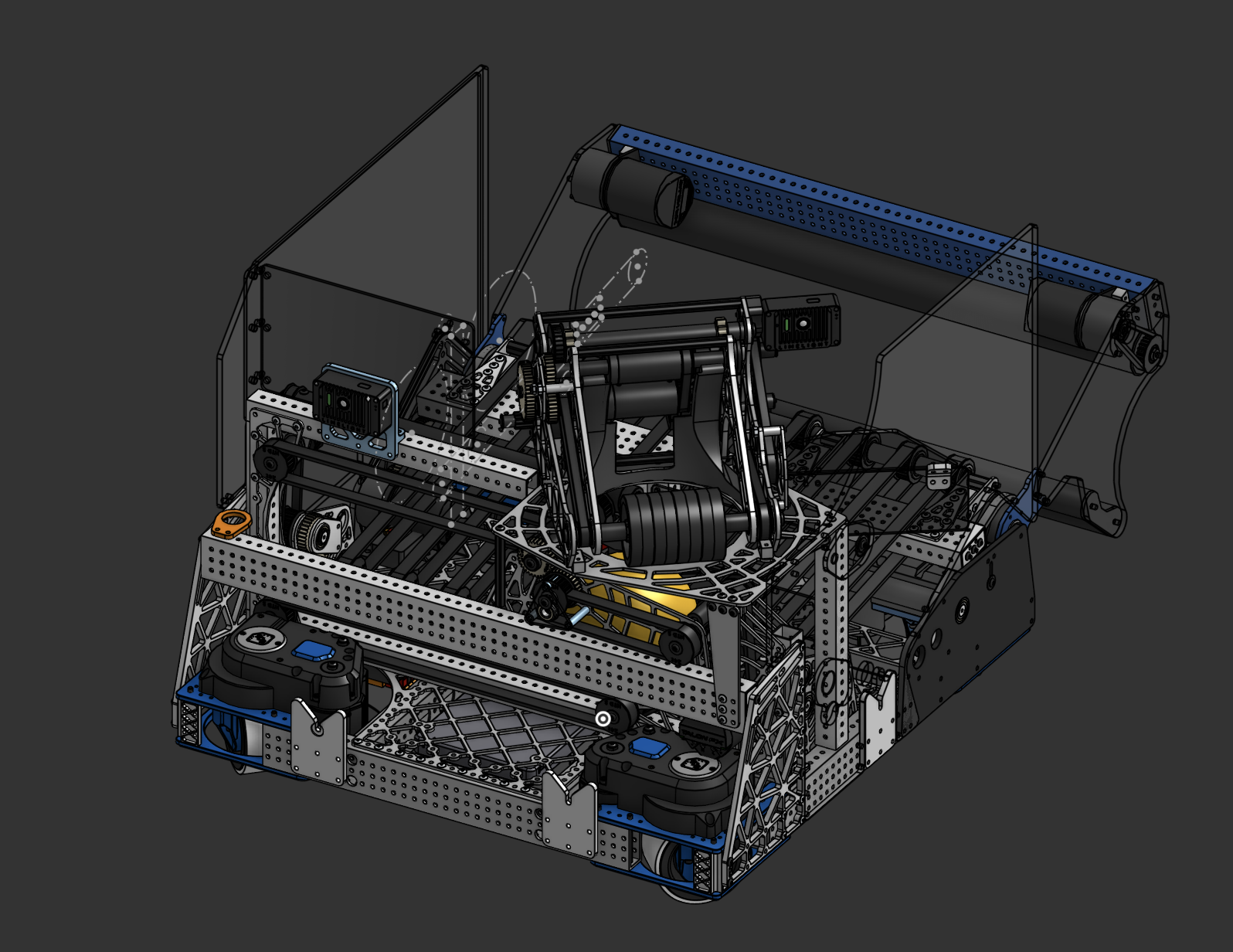
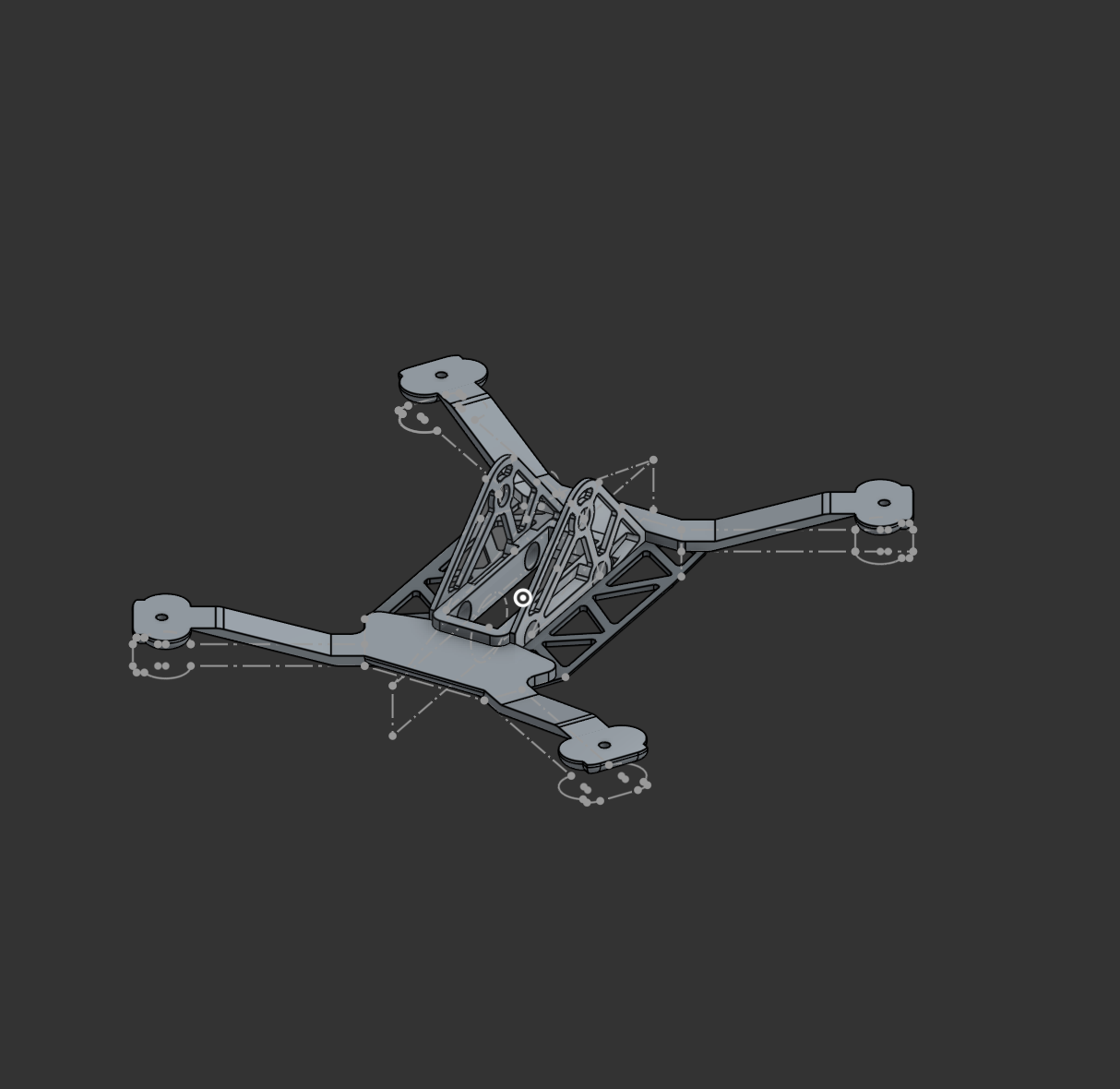
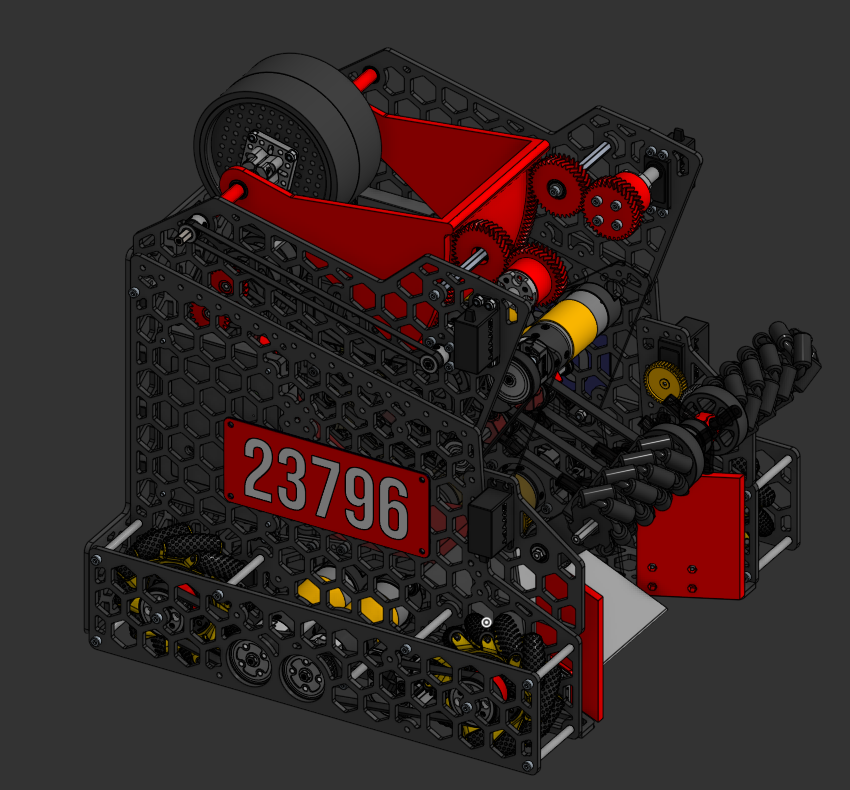
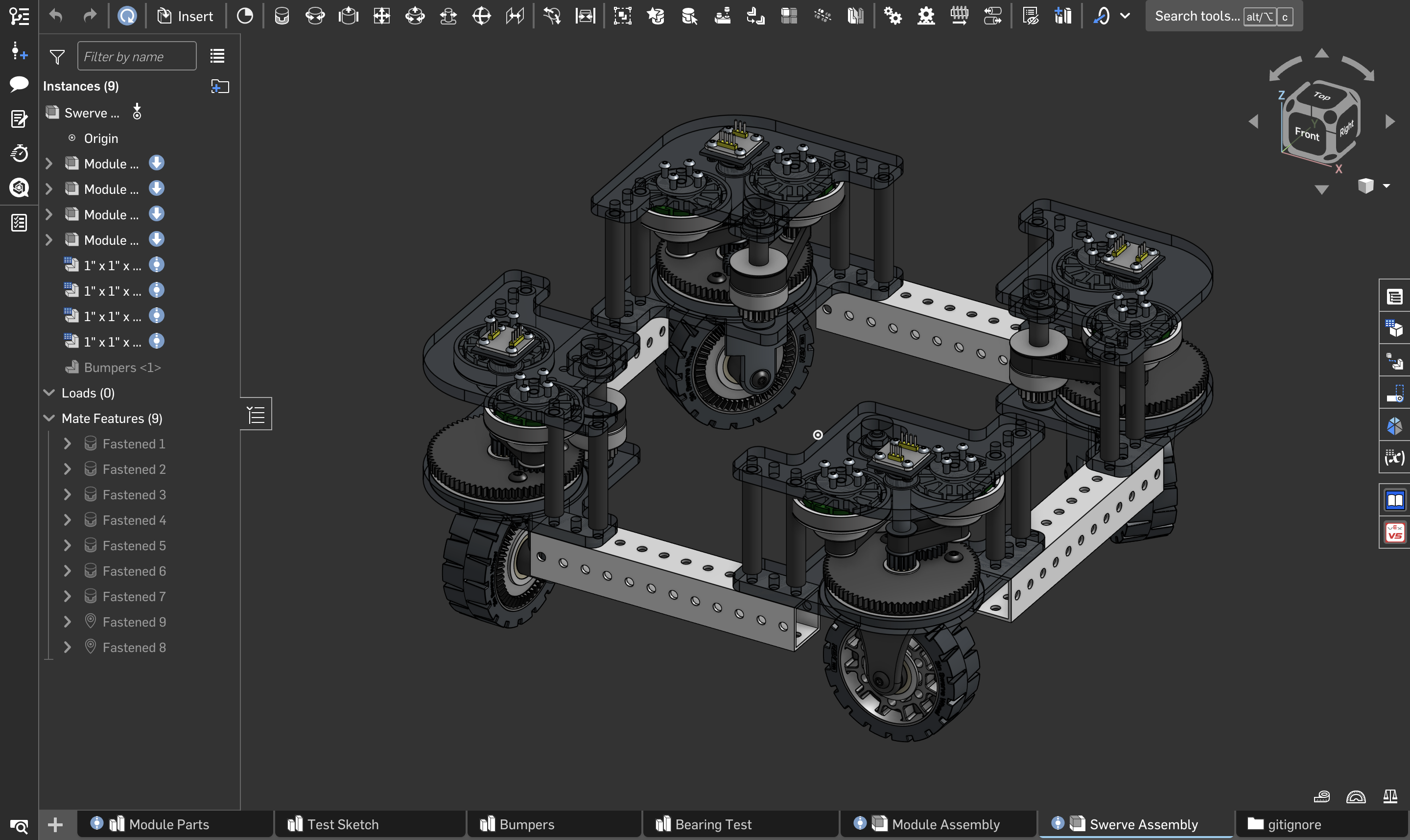
The Mini Swerve Drive is a compact four-module swerve drivetrain. Every module steers and drives on its own, mounted on a 12.25-inch square chassis. The robot moves in any direction while rotating at the same time, the same omnidirectional control system you'll find on competition robots and industrial mobile platforms. Each module pairs a brushless drive motor with a brushless steering motor through an 8:1 reduction. A magnetic encoder closes the loop on wheel angle, giving us precise and repeatable positioning.
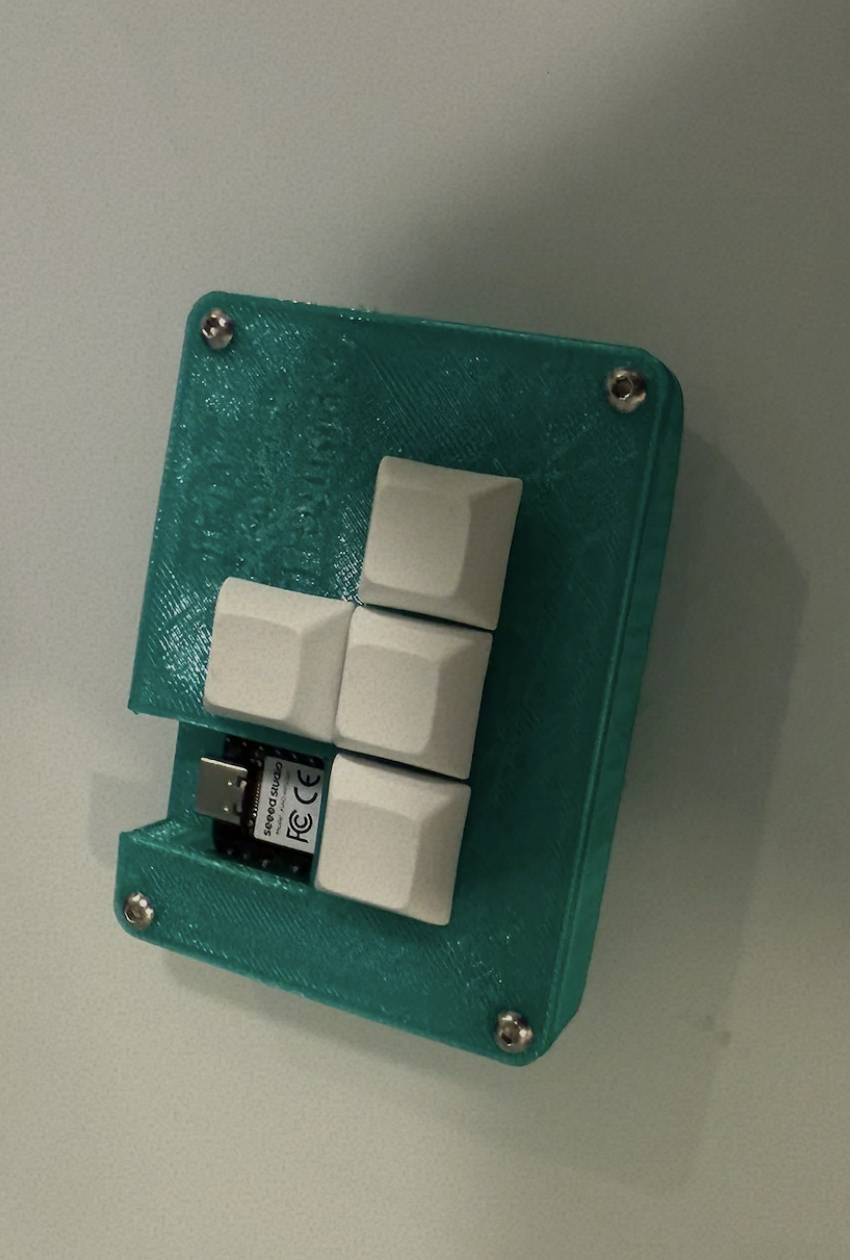
What makes this build different: we engineered nearly every layer in-house. The mechanical assembly came together in CAD from scratch. The control electronics live on a custom PCB carrier board we designed around an ESP32-S3 master controller. Field-oriented motor control runs on dedicated FOC drivers that talk over a shared bus. The master pulls commands from a radio receiver, runs swerve kinematics in real time, and coordinates eight motors at once. Mechanical design, custom circuitry, PCB layout, embedded firmware, motor control algorithms; one working platform pulls all of it together.
The Mini Swerve Drive doubles as proof of engineering capability and as the foundation for our education work. It shows the same core skills industrial automation demands: precise motion control, robust electronics design, system integration, and the ability to take a complex mechatronic system from idea to working hardware.
A formal physical build is on the way. We'll update this writeup once it's done.